- 首頁
-
產(chǎn)品中心

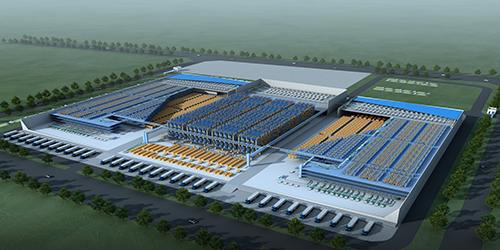
AS/RS系統(tǒng)

AS/RS系統(tǒng)

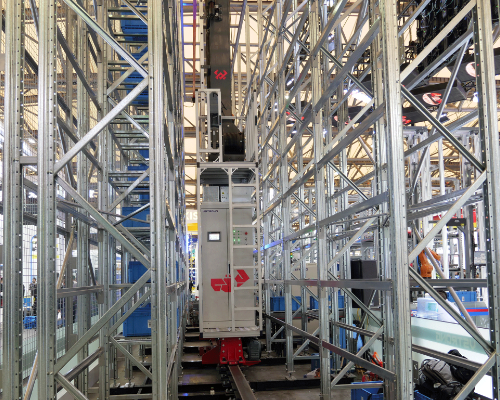
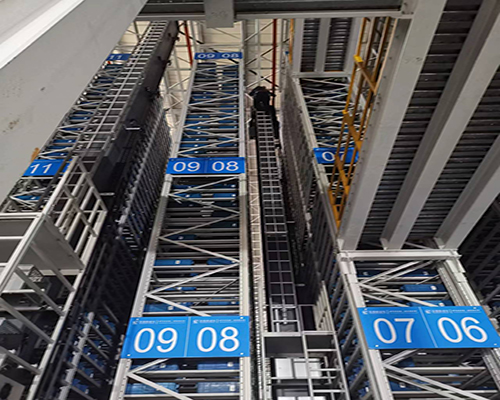
AS/RS系統(tǒng)-有軌巷道堆垛機(單深)

AS/RS系統(tǒng)-有軌巷道堆垛機(雙深)

AS/RS系統(tǒng)-有軌巷道堆垛機(多深)

AS/RS系統(tǒng)-托盤輸送設備

AS/RS系統(tǒng)-RGV設備

AS/RS系統(tǒng)-環(huán)穿設備

AS/RS系統(tǒng)-托盤提升機

MINILOAD系統(tǒng)
MINILOAD系統(tǒng)

MINILOAD系統(tǒng)

MINILOAD系統(tǒng)
MINILOAD系統(tǒng)

MINILOAD系統(tǒng)

箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列
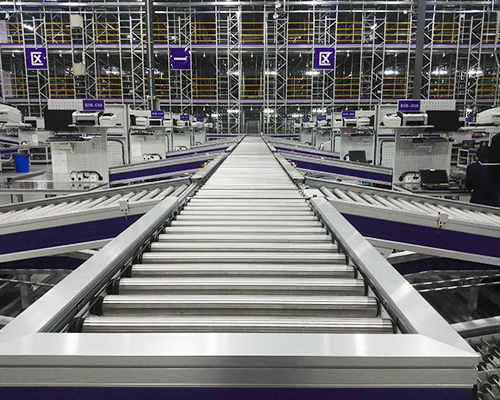
箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列

箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列

箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列

箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列

箱式輸送系統(tǒng)-鋁合金結(jié)構(gòu)系列

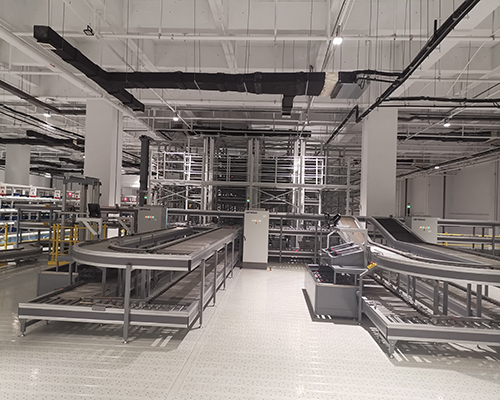
箱式輸送系統(tǒng)-碳鋼結(jié)構(gòu)系列

箱式輸送系統(tǒng)-碳鋼結(jié)構(gòu)系列

箱式輸送系統(tǒng)-碳鋼結(jié)構(gòu)系列

箱式輸送系統(tǒng)-碳鋼結(jié)構(gòu)系列

螺旋提升機

垂直提升機
-
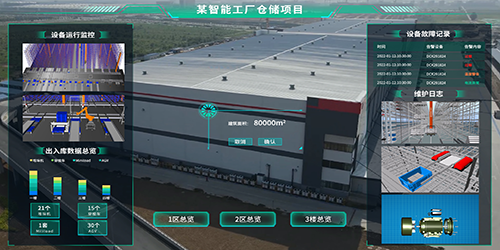
軟件中心
- 行業(yè)方案
-
無憂服務
- 新聞中心
-
關(guān)于我們






























400-010-3808
收藏我們